Equazioni cardinali della statica
Le equazioni cardinali della statica (ECS) sono un insieme di equazioni fondamentali nella meccanica classica che descrivono l'equilibrio di un corpo rigido. Queste equazioni sono essenziali per determinare le condizioni di equilibrio statico di strutture e sistemi meccanici, permettendo di calcolare le reazioni vincolari.[1] Le ECS si applicano sia a sistemi tridimensionali generici sia a sistemi bidimensionali in una forma semplificata.
Sono sufficienti per risolvere completamente e in modo univoco i sistemi isostatici, dove il numero di gradi di vincolo (GdV) è uguale al numero di gradi di libertà (GdL). Tuttavia, per i sistemi iperstatici, dove il numero di gradi di vincolo è maggiore dei gradi di libertà (GdV > GdL), le ECS da sole non sono sufficienti, poiché il numero di vincoli e quindi di reazioni vincolari incognite supera il numero di equazioni indipendenti disponibili.
Reazioni vincolari e sistemi isostatici
modificaReazioni Vincolari
modificaNell'ambito della meccanica statica, le reazioni vincolari rappresentano le forze che un vincolo esercita su un corpo per limitarne il moto. Esse nascono come conseguenza del principio di azione e reazione, secondo cui ad ogni azione corrisponde una reazione uguale e contraria.[2]
In un sistema vincolato, le reazioni vincolari si contrappongono alle forze applicate e alle forze peso, assumendo un ruolo fondamentale nell'equilibrio statico della struttura. La loro determinazione risulta indispensabile per valutare la distribuzione degli sforzi interni e la resistenza della struttura stessa. Nella statica sono presenti tre diverse tipologie di vincoli con relative reazioni:
- Vincolo di appoggio semplice o carrello: permette la traslazione orizzontale del corpo e genera una reazione vincolare normale, perpendicolare alla superficie di appoggio.
- Vincolo cerniera: consente la rotazione del corpo attorno ad un asse fisso e produce due reazioni vincolari: una forza assiale e una perpendicolare alla superficie di appoggio.
- Vincolo incastro: elimina completamente la libertà di moto del corpo, generando tre reazioni vincolari: una forza assiale, una perpendicolare e un momento rispetto alla superficie di appoggio.
-
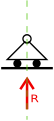 Il carrello
Il carrello -
 La cerniera
La cerniera -
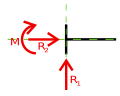 L'incastro
L'incastro



Gradi di libertà
modificaI gradi di libertà rappresentano i possibili movimenti che un corpo rigido può compiere nello spazio. In un sistema tridimensionale, un corpo rigido ha complessivamente 6 gradi di libertà: 3 traslazioni (movimento lungo gli assi x, y, z) e 3 rotazioni (attorno agli assi x, y, z). Nel caso di un sistema piano, i gradi di libertà si riducono a 3: 2 traslazioni (x, y) e 1 rotazione (attorno all'asse perpendicolare al piano).
Tipologie di Sistemi
modifica


Nel campo dell'ingegneria civile e strutturale, la classificazione dei sistemi in base al numero di vincoli e ai gradi di libertà risulta fondamentale per comprenderne il comportamento e l'analisi sotto l'azione di carichi esterni. In particolare, si distinguono tre tipologie:[3]
Sistemi labili
modificaUn sistema labile presenta un numero di gradi di vincolo (V) minore al numero di gradi di libertà (GdL). In questo caso, i vincoli non sono sufficienti a impedire completamente il moto del corpo rigido, che potrebbe subire spostamenti o rotazioni indefinite sotto l'azione di forze esterne o squilibri interni. Le caratteristiche di un sistema labile sono:
- Sistema indeterminato: le equazioni cardinali della statica non sono sufficienti per determinare univocamente le reazioni vincolari e gli sforzi interni.
- Struttura instabile: la struttura presenta meccanismi cinematici che ne permettono il moto indefinito.
- Analisi statica complessa: la determinazione delle reazioni vincolari e degli sforzi interni richiede metodi specifici, come l'analisi cinematica o l'utilizzo di software di calcolo strutturale.
Sistemi isostatici
modificaUn sistema isostatico è caratterizzato da un numero di gradi di vincolo (V) uguale al numero di gradi di libertà (GdL). In altre parole, i vincoli presenti nella struttura sono sufficienti e necessari per impedire qualsiasi movimento del corpo rigido sotto l'azione dei carichi esterni. Le caratteristiche di un sistema isostatico sono:
- Sistema determinato: le equazioni cardinali della statica forniscono un numero di equazioni pari al numero di incognite (reazioni vincolari).
- Struttura stabile: i vincoli garantiscono l'indeformabilità della struttura sotto l'azione dei carichi esterni.
- Analisi statica relativamente semplice: la determinazione delle reazioni vincolari e degli sforzi interni risulta più agevole rispetto a sistemi non isostatici.
Sistemi iperstatici
Un sistema iperstatico presenta un numero di gradi di vincolo (V) maggiore al numero di gradi di libertà (GdL). In questa situazione, i vincoli sono ridondanti, ovvero ne sono presenti più del necessario per garantire l'equilibrio statico della struttura. Le caratteristiche di un sistema iperstatico sono:
- Sistema iperdeterminato: le equazioni cardinali della statica non sono sufficienti a determinare univocamente le reazioni vincolari e gli sforzi interni.
- Struttura stabile: i vincoli ridondanti garantiscono l'equilibrio statico, ma non eliminano completamente la possibilità di deformazioni interne.
- Analisi statica complessa: la determinazione delle reazioni vincolari e degli sforzi interni richiede metodi specifici, come il metodo delle forze interne ridondanti o l'utilizzo di software di calcolo strutturale.
Sistemi bidimensionali
modificaLe equazioni cardinali della statica in sistemi bidimensionali descrivono le condizioni di equilibrio di un corpo rigido su un piano. In questo contesto, l'analisi fa riferimento a tre gradi di libertà: la traslazione orizzontale sugli assi x e y e la rotazione sullo stesso piano. Da questo si riescono a ricavare le seguenti equazioni:

Equilibrio delle forze: La somma vettoriale di tutte le forze applicate su un corpo rigido deve essere sempre uguale a zero. Nel caso di coordinate bidimensionali, si scompongono nelle equazioni (Fx) delle forze orizzontali e (Fy) delle forze verticali.
Equilibrio dei momenti: La somma dei momenti applicati su un corpo rigido rispetto a un punto (spesso un punto di supporto o il centro di massa) deve essere sempre uguale a zero.
Sistemi tridimensionali
modificaNel campo della statica dei sistemi tridimensionali, le equazioni cardinali della statica rappresentano un insieme di principi fondamentali che descrivono le condizioni di equilibrio per un corpo rigido soggetto a un sistema di forze e momenti nello spazio. Queste equazioni sono espresse da tre relazioni vettoriali:
Equilibrio alla traslazione
modificaSommando tutte le forze applicate al corpo, si ottiene una risultante che deve essere nulla affinché il corpo rimanga in equilibrio statico. Matematicamente, si esprime come:

Dove ∑F rappresenta la somma vettoriale di tutte le forze agenti sul corpo.
Equilibrio alla rotazione
modificaSommando tutti i momenti rispetto a un punto qualsiasi nello spazio, si ottiene un risultante momento che deve essere nullo affinché il corpo rimanga in equilibrio rotazionale. Matematicamente, si esprime come:

Dove ∑M rappresenta la somma vettoriale di tutti i momenti agenti sul corpo rispetto al punto scelto.
Condizione di equilibrio per i momenti paralleli
modificaLa somma dei momenti paralleli ad un asse qualsiasi nello spazio deve essere nulla. Questa equazione è particolarmente utile per sistemi di forze che giacciono su un piano o per casi in cui si desidera analizzare l'equilibrio rotazionale attorno a un asse specifico. Matematicamente, si esprime come:

Dove ∑Mp rappresenta la somma algebrica dei momenti paralleli all'asse scelto.
Nei sistemi tridimensionali, che costituiscono il caso più generale, il sistema di equazioni è più ampio. Ciò è dovuto al fatto che i gradi di libertà nello spazio sono 6: tre traslazioni lungo i tre assi indipendenti e tre rotazioni attorno ai tre assi indipendenti. Stabilito un sistema di riferimento x-y-z , le equazioni sono dunque:

Dove:
- Le sommatorie delle forze lungo gli assi x, y e z (Fx, Fy, Fz) sono nulle.
- Le sommatorie dei momenti attorno agli assi x, y e z (Mx, My, Mz) calcolati in un punto qualsiasi a, b e c dei rispettivi piani di rotazione (y-z, x-z, x-y) sono anch'essi nulli.
Note
modifica- ^ L'equilibrio di un corpo rigido, su raiscuola.rai.it.
- ^ Reazioni vincolari ed equazioni cardinali della statica, su edutecnica.it.
- ^ Ipostaticità, isostaticità, iperstaticità, su it.wikiversity.org.
Bibliografia
modifica- Statica. Fondamenti di meccanica strutturale, McGraw-Hill Education, 1º gennaio 2009, ISBN 9788838665103.
- Francesco Marotti De Sciarra, Fondamenti di statica delle strutture, 1º gennaio 2010, ISBN 9788820749743.
- Belluzzi Odone, Scienza delle Costruzioni (1º volume), Zanichelli, 2019.
- Giulio Ceradini, Scienza delle costruzioni. 1: Cinematica e statica dei sistemi rigidi, Roma, ESA, ISBN 88-405-3017-7.
Voci correlate
modificaAltri progetti
modifica Wikiversità contiene risorse su Equazioni cardinali della statica
Wikiversità contiene risorse su Equazioni cardinali della statica Wikimedia Commons contiene immagini o altri file su Equazioni cardinali della statica
Wikimedia Commons contiene immagini o altri file su Equazioni cardinali della statica
Collegamenti esterni
modifica- Equazioni cardinali della statica (PDF), su albertostrumia.it.
- Paolo Casini, Scienza delle Costruzioni (PDF), su pcasini.it.
- Elementi di statica (PDF), su brianzalabfactory.it.