File:Cyclope robot.jpg

Dimensioni di questa anteprima: 800 × 500 pixel. Altre risoluzioni: 320 × 200 pixel | 640 × 400 pixel | 1 024 × 640 pixel | 1 280 × 800 pixel | 2 036 × 1 272 pixel.
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
File originale (2 036 × 1 272 pixel, dimensione del file: 961 KB, tipo MIME: image/jpeg)
| Questo file e la sua pagina di descrizione (discussione · modifica) si trovano su Wikimedia Commons (?) |
{kind=link}
{kind=link}
{kind=link}
| Descrizione |
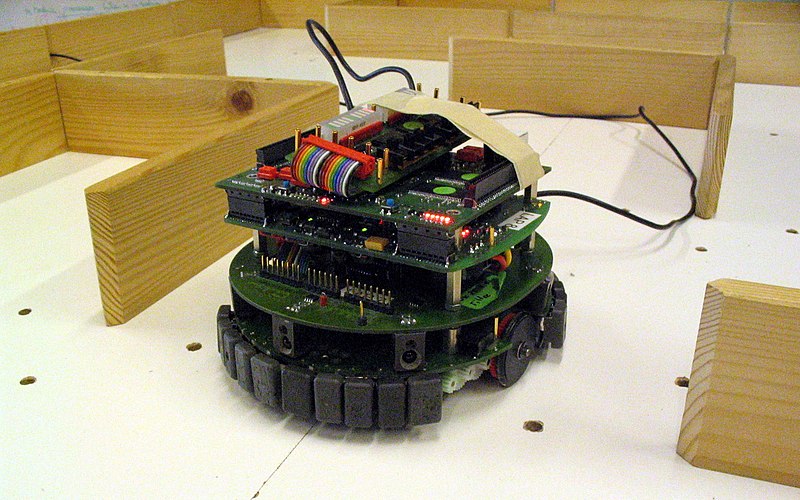
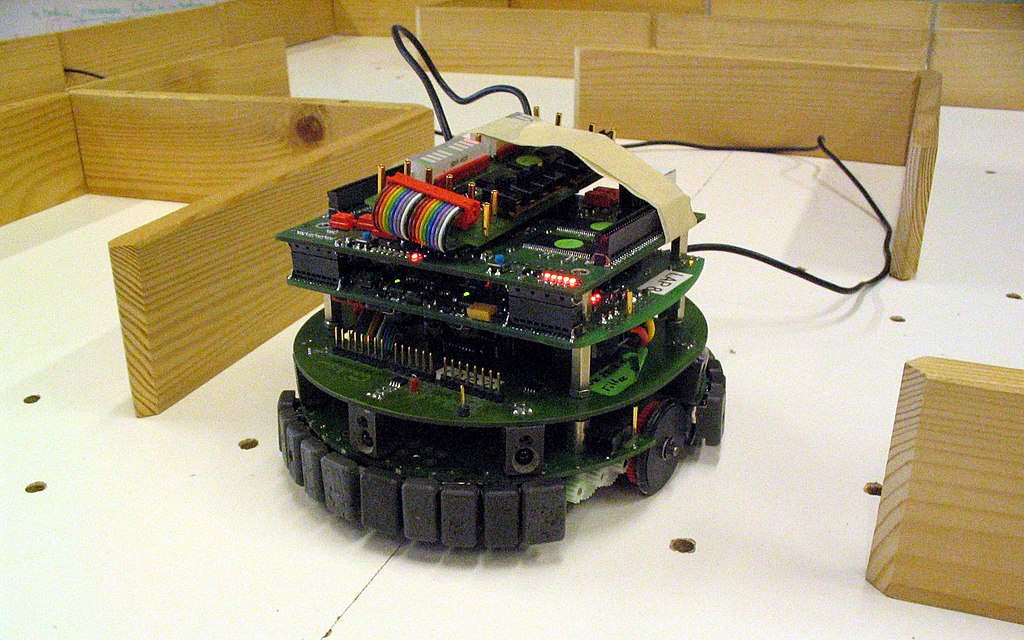
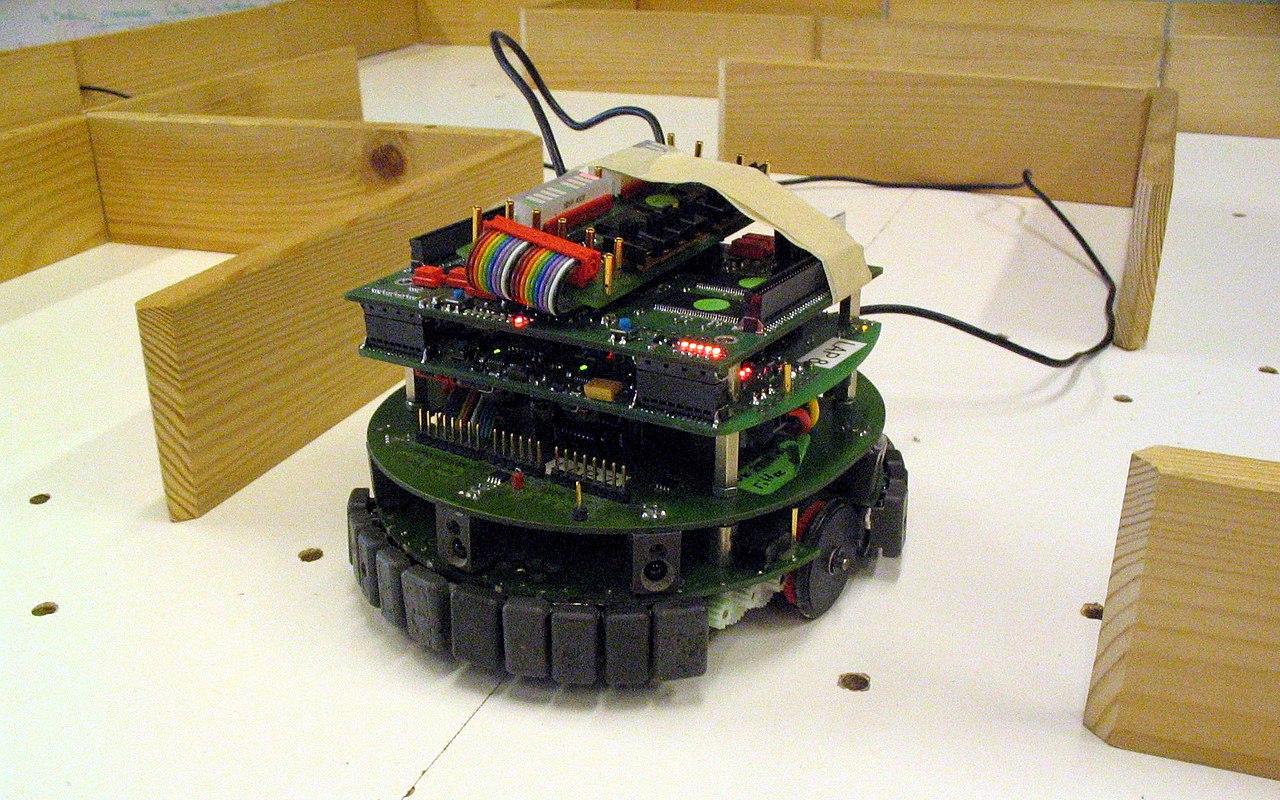
English: Blind "Cyclope" in a maze at EPFL / Switzerland. Moving with Braitenberg-style activation rules and a small FSM.
The Cyclope is a low cost didactic robot, with a nice set of sensors for doing students labs on assembly language and sensor drivers. The version on the picture is an enhanced Cycloped based on the "RokEPXA" card developped at EPFL. The FPGA is an Altera EPXA1. RokEPXA is a minimal board using A-BUS compatible power-supply. RokEPXA replaces old main boards RokHC12 and Rok68 of the robot Cyclope and opens a new era. Altera EPXA integreted circuit contains an "hardcore" ARM922T processor system and a FPGA. This board can not only be used with the robot Cyclope but in many others applications. Now, it's possible to build a multi-processor system using Altera NIOS "softcore" processor system in FPGA, for example. |
| Fonte | More info here : http://lapwww.epfl.ch/dev/arm/index.php?presentation |
| Autore | Picture taken by Dake |

|
È permesso copiare, distribuire e/o modificare questo documento in base ai termini della GNU Free Documentation License, Versione 1.2 o successive pubblicata dalla Free Software Foundation; senza alcuna sezione non modificabile, senza testo di copertina e senza testo di quarta di copertina. Una copia della licenza è inclusa nella sezione intitolata Testo della GNU Free Documentation License. |
| Questo file è disponibile in base alla licenza Creative Commons Attribuzione-Condividi allo stesso modo 3.0 Unported | ||
| ||
| Questo tag di copyright è stato aggiunto nell'ambito dell'aggiornamento della licenza dei progetti Wikimedia. |
Cronologia del file
Fare clic su un gruppo data/ora per vedere il file come si presentava nel momento indicato.
| Data/Ora | Miniatura | Dimensioni | Utente | Commento | |
|---|---|---|---|---|---|
| attuale | 20:07, 9 lug 2008 | | 2 036 × 1 272 (961 KB) | Mysid | white point reset & crop |
| 22:49, 27 ago 2005 |  | 2 048 × 1 536 (983 KB) | Dake~commonswiki | Blind "Cyclope" in a maze at EPFL / Switzerland. Moving with Braitenberg-style activation rules and a small FSM. The Cyclope is a low cost didactic robot, with a nice set of sensors for doing students labs on assembly language and sensor drivers. |
Pagine che usano questo file
Le seguenti 3 pagine usano questo file:
Utilizzo globale del file
Anche i seguenti wiki usano questo file:
- Usato nelle seguenti pagine di ca.wiki.x.io:
- Usato nelle seguenti pagine di de.wiki.x.io:
- Usato nelle seguenti pagine di en.wiki.x.io:
- Usato nelle seguenti pagine di es.wiki.x.io:
- Usato nelle seguenti pagine di fa.wiki.x.io:
- Usato nelle seguenti pagine di fi.wiki.x.io:
- Usato nelle seguenti pagine di fr.wiki.x.io:
- Usato nelle seguenti pagine di he.wiki.x.io:
- Usato nelle seguenti pagine di nl.wiki.x.io:
- Usato nelle seguenti pagine di uk.wiki.x.io:
- Usato nelle seguenti pagine di vi.wiki.x.io:
- Usato nelle seguenti pagine di wuu.wiki.x.io:
- Usato nelle seguenti pagine di zh-yue.wiki.x.io:
- Usato nelle seguenti pagine di zh.wiki.x.io:
{kind=link}